

1
空三的原始數(shù)據(jù)
空三的原始數(shù)據(jù)主要由四個部分:原始影像、POS信息、像控點點位坐標、像控點現(xiàn)場照片。

圖片
2
加密流程
在PhotoScan中的加密流程主要是下面幾個步驟:
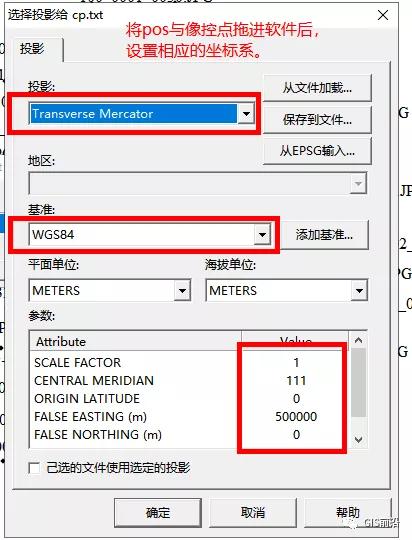
2.1導(dǎo)入照片及pos信息
在工作流程中添加照片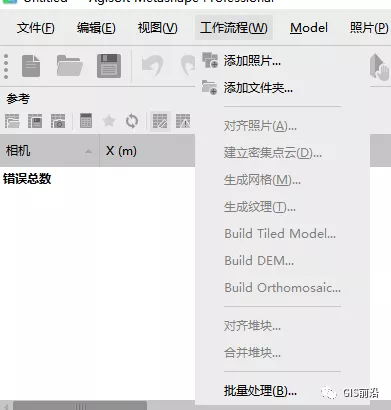
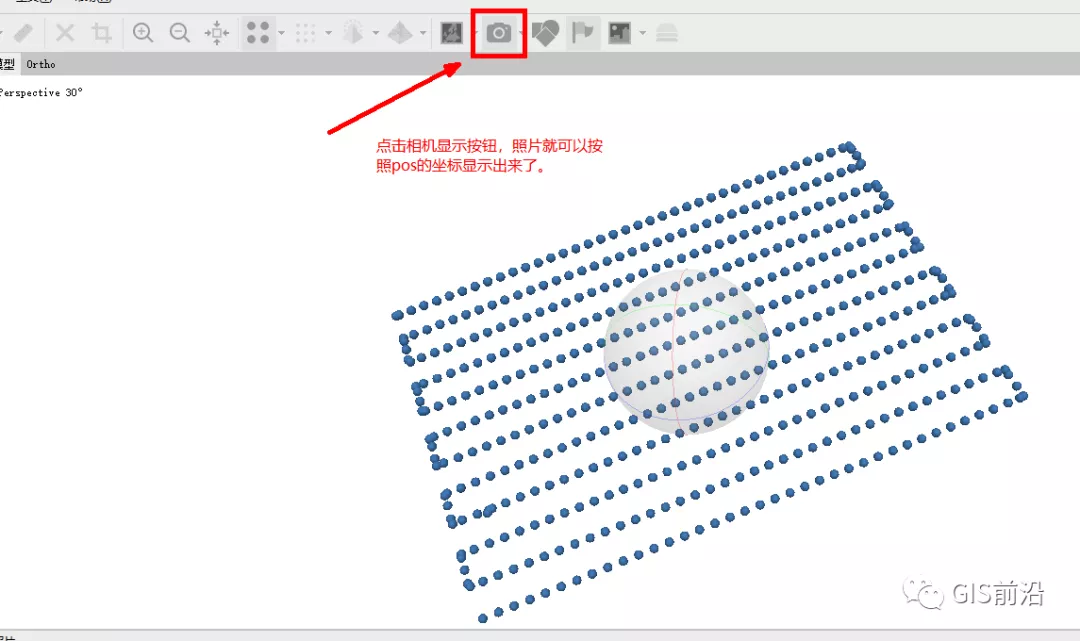
點擊輸入?yún)⒄眨x擇pos文件。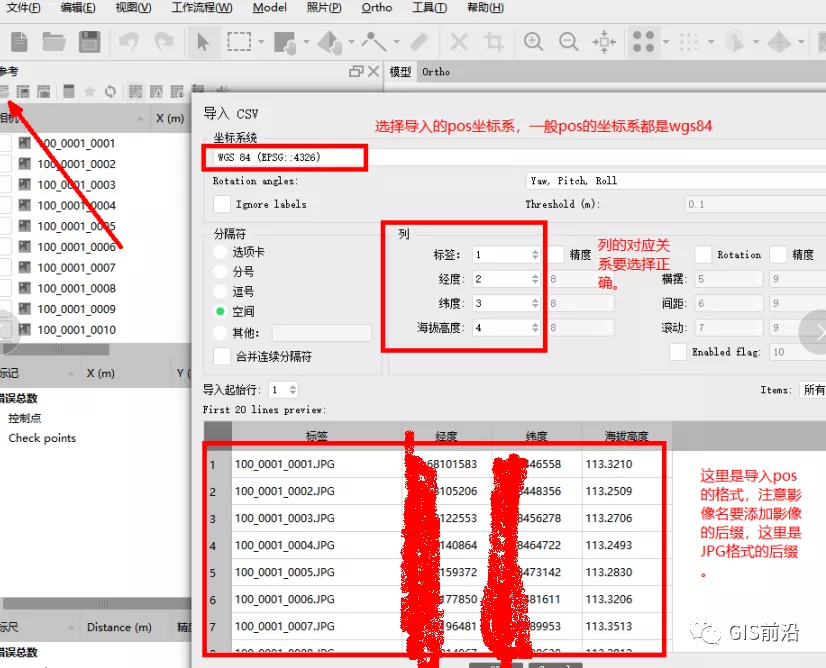
2.2對齊照片
對齊照片照片主要是軟件匹配同名點的過程。
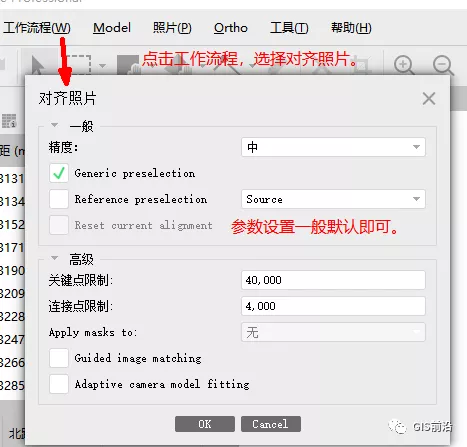
對齊照片完成之后就可以查看連接點的匹配效果、有沒有丟片。
2.3像控點的導(dǎo)入與編輯
匹配完成之后就可以導(dǎo)入像控點進行刺點了。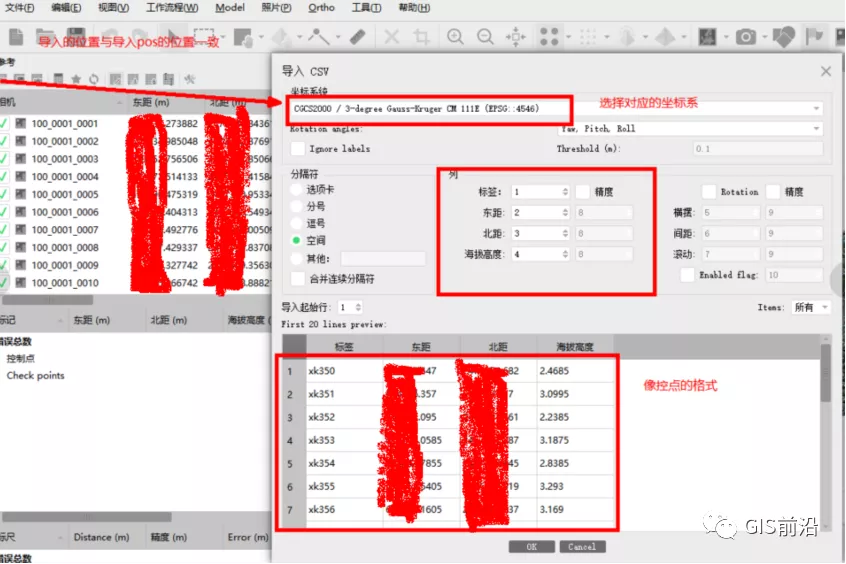
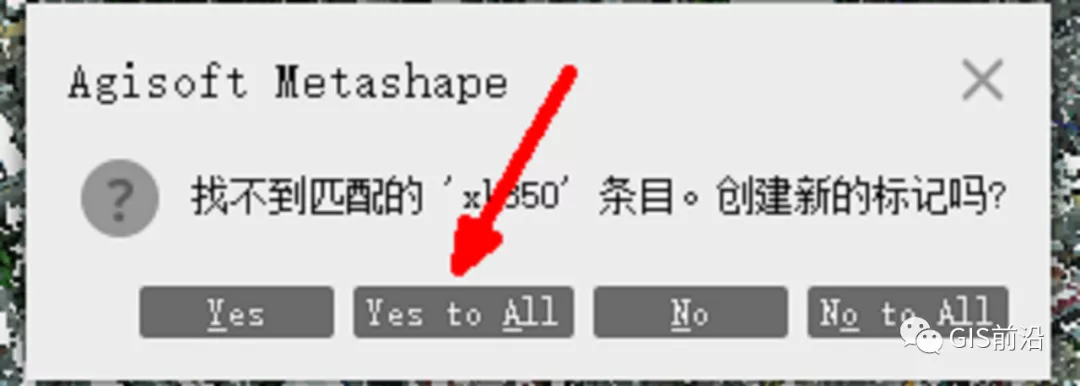
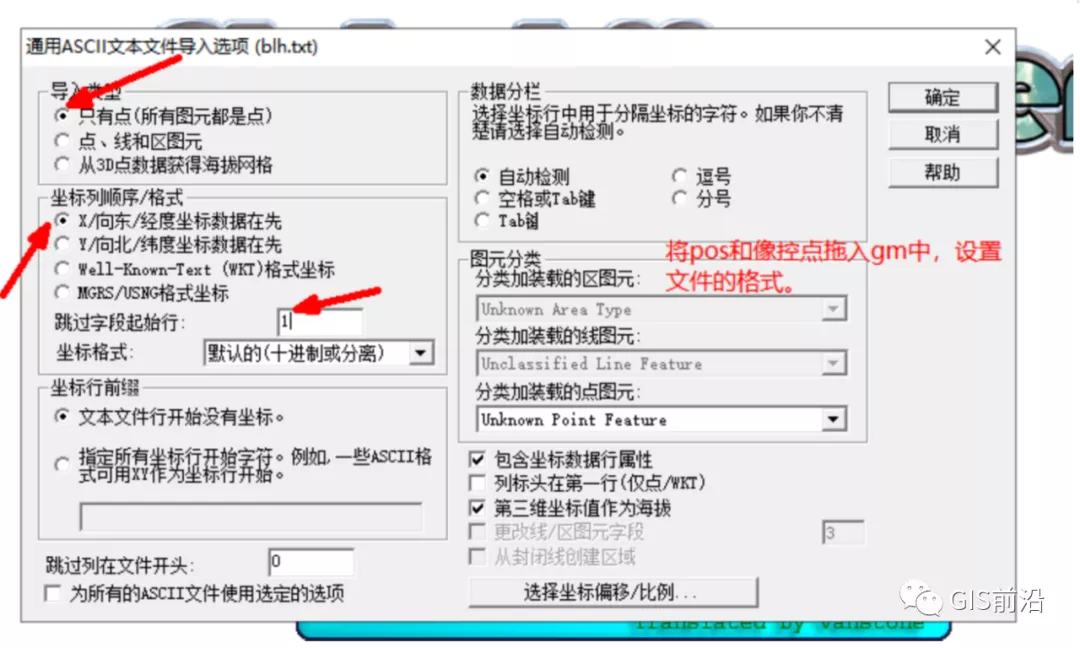
照片導(dǎo)入之后利用Global Mapper軟件,將pos與像控點加載進來,用于查找像控點在哪張照片上,用于在PhotoScan刺入像控點。
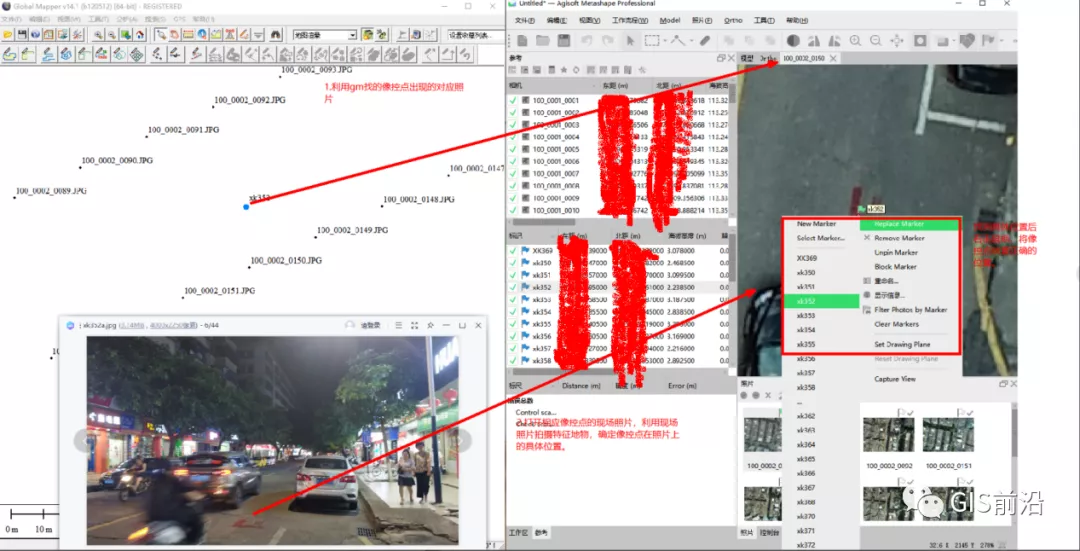
通過上面的方式刺入三個以上的像控點(盡可能分布在相控的四周),下面就可以進行優(yōu)化平差了。
2.4優(yōu)化照片對齊方式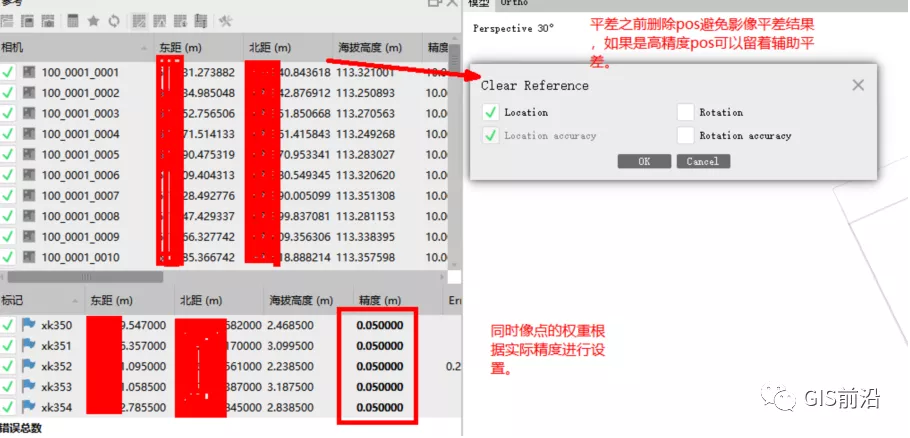
優(yōu)化照片對齊方式即時空三平差的過程,利用像控點進行pos信息的反算。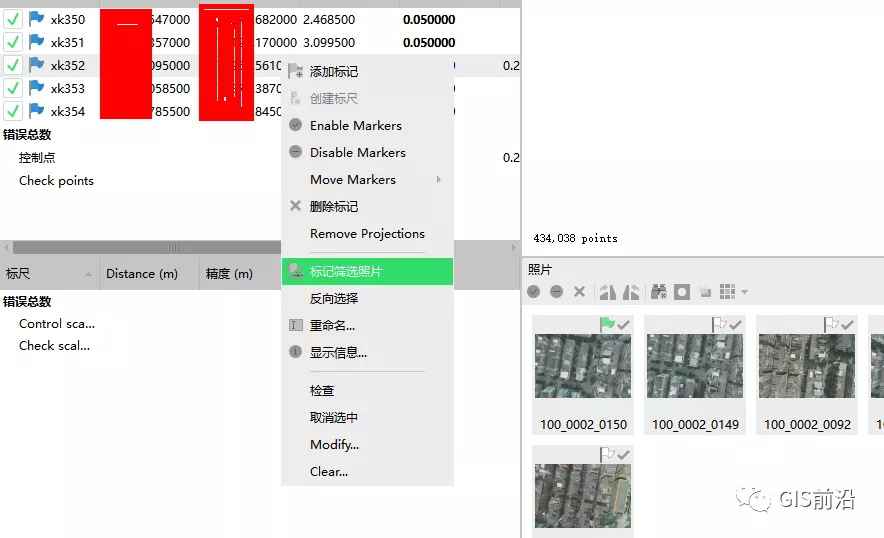
圖片
優(yōu)化完成之后,將剩余的像控點刺完,再次優(yōu)化,優(yōu)化完成后,對比成果要求,殘差滿足要求后即完成空三加密過程。
圖片
圖片
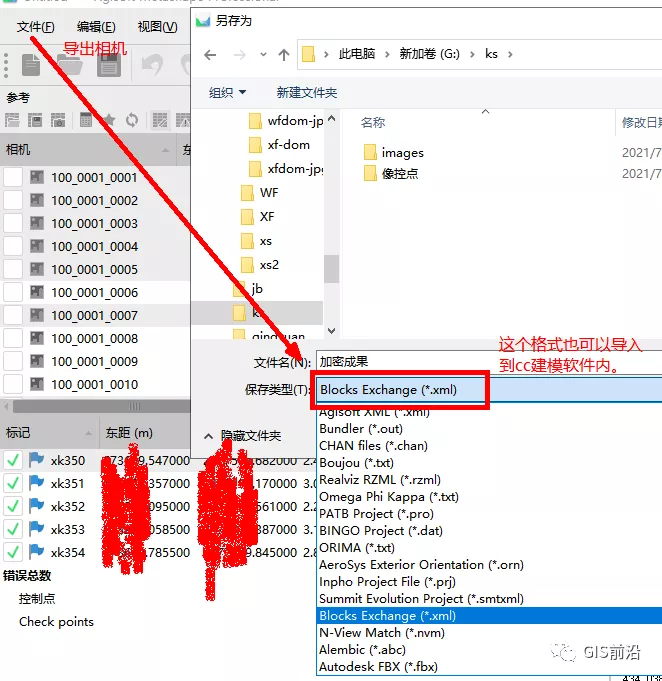
加密完成之后導(dǎo)出加密成果,成果格式導(dǎo)出的格式參照下一步生產(chǎn)軟件能夠恢復(fù)的空三格式導(dǎo)出。
3
恢復(fù)空三
這里利用航天遠景的軟件做后續(xù)的采集,導(dǎo)出的空三格式這里選擇。
這里恢復(fù)空三用到航天遠景的一個小插件(主要就是提取航片相機文件,畸變參數(shù)和外方位元素)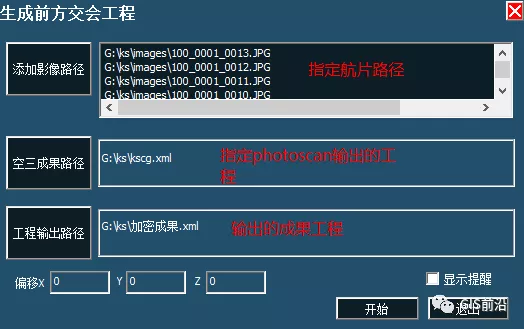
在測圖軟件中檢查空三精度,精度滿足要求后就可以進行采集生產(chǎn)了。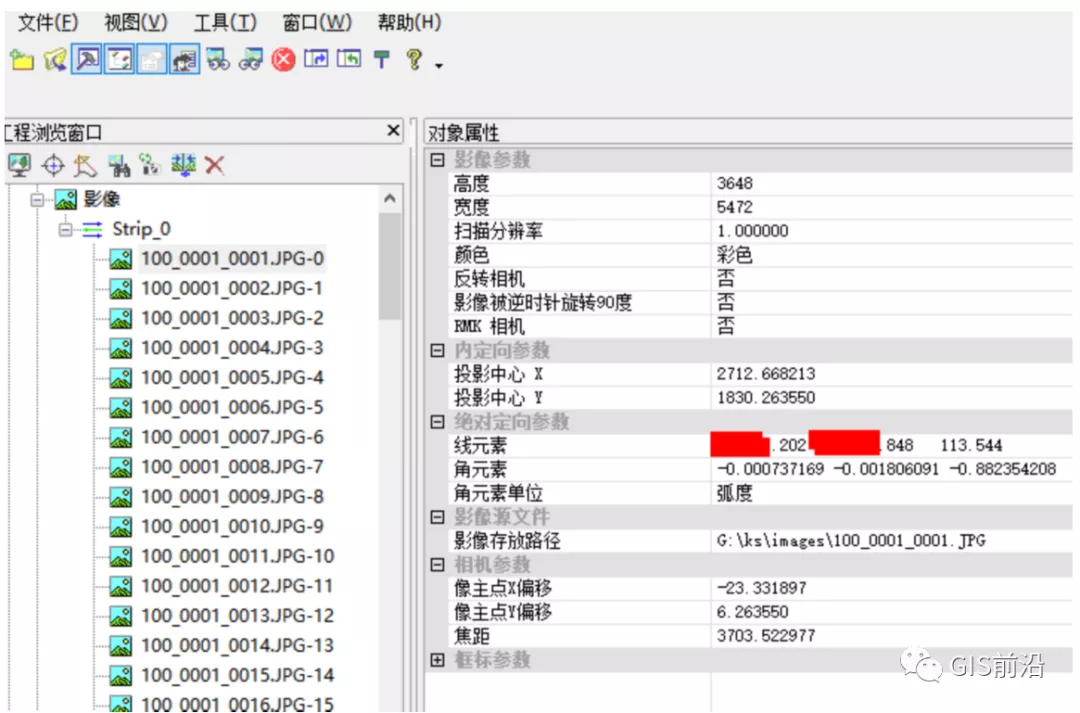
成都途遠GIS是一家專業(yè)致力于無人機航空攝影測繪、航空數(shù)據(jù)處理、GIS地理信息系統(tǒng)研發(fā)、數(shù)字孿生城市制作、數(shù)字沙盤模型等業(yè)務(wù)的創(chuàng)新型科技公司,為您提供一站式地理信息服務(wù)。
本文鏈接:http://www.plccbuy.com/blog/497.html
本文標簽:像控點











